 ລາວ
ລາວ-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย -
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български - ລາວ
-
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português


ບ້ານ
>
ຜະລິດຕະພັນ > ການຫັນແລະ Milling ເຄື່ອງປະສົມ
>
Turret ພະລັງງານຄວາມໄວສູງປ່ຽນແລະເຄື່ອງຈັກຜະລິດເຟີນິເຈີ້









Turret ພະລັງງານຄວາມໄວສູງປ່ຽນແລະເຄື່ອງຈັກຜະລິດເຟີນິເຈີ້
turret ພະລັງງານຄວາມໄວສູງຂອງJingfusi®ທີ່ຫັນປ່ຽນຄວາມໄວສູງເຫຼົ່ານີ້ສາມາດປະຕິບັດທັງການຫັນປ່ຽນແລະກໍາປັ່ນທີ່ມີຄວາມຫລາກຫລາຍຢູ່ເທິງວັດສະດຸ, ລວມທັງໂລຫະ, ພາດສະຕິກ, ແລະອື່ນໆ. ການປ່ຽນແມ່ນໃຊ້ສໍາລັບມີຮູບຊົງກະບອກ, ໃນຂະນະທີ່ກໍາລັງຜະລິດມີວຽກເຮັດງານທໍາສໍາລັບພື້ນຜິວແບນຫລືຂອບ.
ຕົວແບບ:CK46DTY
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
ເຄື່ອງຈັກກໍາປັ່ນພະລັງງານຄວາມໄວສູງຂອງingfusi®ຫັນປ່ຽນແລະ Milling Compound Machine ເຄື່ອງມືທີ່ຖືກອອກແບບມາສໍາລັບເຄື່ອງຈັກທີ່ມີຄວາມໄວສູງແລະຊັດເຈນ. ມັນແມ່ນເຫມາະສົມໂດຍສະເພາະສໍາລັບສ່ວນປະກອບການຜະລິດທີ່ມີຄຸນລັກສະນະທີ່ມີຄຸນລັກສະນະທີ່ເຂັ້ມຂົ້ນແລະມີຄວາມຕ້ອງການ.
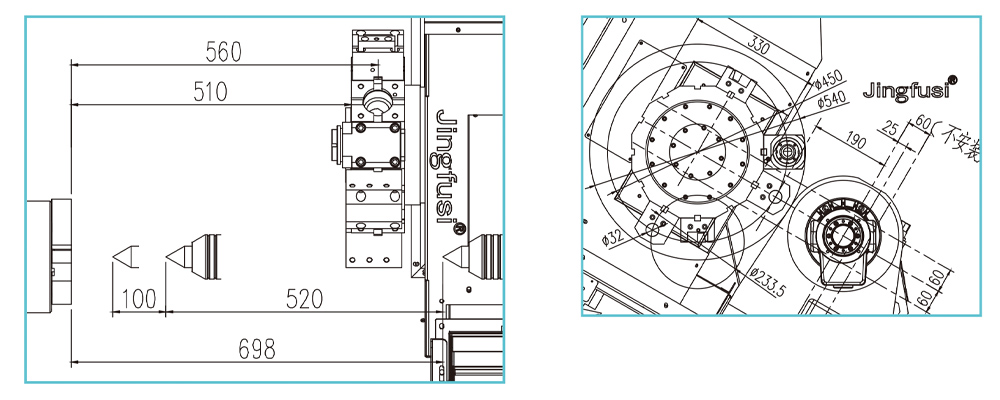

ແຜນວາດການເດີນທາງຂອງເຄື່ອງຈັກ
ລາຍລະອຽດຂອງຜະລິດຕະພັນ
ບັນຊີລາຍຊື່ພາລາມິເຕີ
| ລາຍການ | ຮູບແບບຂອງ lathe | ຫນ່ວຍງານ | ck46dty | CK52DTY |
| ຂອບເຂດການປຸງແຕ່ງ | ເສັ້ນຜ່າກາງຫມູນວຽນສູງສຸດຂອງ spindle ໄດ້ | mm | ø 600 | |
| ຄວາມຍາວຂອງວົງມົນດ້ານນອກສູງສຸດ | mm | 300 | ||
| ເສັ້ນຜ່າສູນກາງທະນູສູງສຸດ | mm | ø 45 | ø 55 | |
| ແກນຫຼັກ | ຄວາມໄວ spindle ສູງສຸດ | r / min | 6000 (ຕັ້ງ 4500) | 4200 (ຕັ້ງຄ່າ 3500) |
| ປະເພດຫົວຫນ້າ spindle |
|
A2-5 | A2-6 | |
| spindle ຜ່ານເສັ້ນຜ່າສູນກາງຂຸມ | mm | ø 56 | ø 66 | |
| ລ້ຽງ | X / Z / Y / y ເສັ້ນເລືອດຕັນສູງສຸດແກນ | mm | 800/400 / ± 60 | |
| ຫົວພະລັງງານ 90 °ທີ່ຜ່ານຈຸດໃຈກາງຂອງ spindle | mm | 60 | ||
| ການເຄື່ອນໄຫວໄວສູງສຸດຂອງ X / Z / Y AXIS | m / ຂອງຂ້ອຍ | 24 (ຕັ້ງ 18) / 24 (ຕັ້ງ 18) / 15 (ຕັ້ງ 12) | ||
| x / z / y / y A ແກນ Axis screw rod | mm | 32/32/32 | ||
| ລາງລົດໄຟ X / Z / Y / Y Axis Axis | mm | 35/35/35 | ||
| turret ພະລັງງານ |
ຮູບແບບ turret ພະລັງງານ (turret ພະລັງງານ) | BMT | BMT45, BMT55 ທາງເລືອກ | |
| ເກັບຫົວຫນ້າພະລັງງານ | ແມ່ນ | er25 | ||
| ຂະຫນາດຂອງຜູ້ຖືເຄື່ອງມືທີ່ກໍານົດ | mm | 25x25 | ||
| ເສັ້ນຜ່າສູນກາງກອງທັບເຮືອ | mm | ø25 | ||
| tailstock | ພະລັງງານມໍເຕີຕົ້ນຕໍ / torque | KW / NM | 7.5 KW / ໃຫ້ຄະແນນ 47nm | 11 ກິລາ / ໃຫ້ຄະແນນ 72NM |
| X / Z / Y / Y Axis Motor Power Power / Torque | KW / NM | Yaskawa 1.8kw / 11.5n. ທາງເລືອກລຸ້ນລຸ້ນໃຫມ່ລຸ້ນໃຫມ່ / ຈັດອັນດັບ 11.5nm | ||
| ຄວາມໄວສູງສຸດຂອງ turret mot ມໍເຕີພະລັງງານ | r / min | 8000000 ° (ຫົວພະລັງງານ≤7000ປ່ຽນ, ຫົວພະລັງງານ 90 ° | ||
| ພະລັງງານມໍເຕີພະລັງງານ / ແຮງບິດ | KW / NM | 8.5 KW / ໃຫ້ຄະແນນ 16,5NM | ||
| ພະລັງງານ / torque ຂອງ turret traving ການປ່ຽນມໍເຕີ | KW / NM | New Generation1.0 KW /3.1NM | ||
| ອື່ນ | ອຸປະກອນເບກຕໍາແຫນ່ງ Spindle |
|
ຄວາມກົດດັນໄຮໂດຼລິກ | |
| inclination ນອນ | ° | 35 ° | ||
| ຄວາມຍາວຂອງເຄື່ອງ X Width x ຄວາມສູງ | mm | 2200x1500x1900 | ||
| ນ້ໍາຫນັກທັງຫມົດຂອງເຄື່ອງຈັກ | ກິໂລ | 3900kg | ||
| ພະລັງງານທັງຫມົດ | ແມະ | 15 | ||
| ການບໍລິໂພກພະລັງງານໂດຍສະເລ່ຍ | kw / h | 3 | ||
ຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງ
| ຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ, ມາດຕະຖານປັດໃຈ JingFus: | ||||||||
| ລາຍການທົດສອບທີ່ສໍາຄັນ | ແຜນວາດ Schematic | ມາດຕະຖານຂອງໂຮງງານ | ||||||
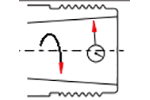
| spindle ຕີ radial |

|
ກວດພົບການແລ່ນຂອງກວຍນອກ | 0.0035 | |||||
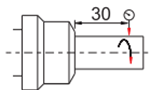
| ຕໍາແຫນ່ງ X-Axis Repart |
|
ກວດພົບການຈັດຕໍາແຫນ່ງ x-axis ຊ້ໍາອີກ. ຫມາຍເຫດ: ການຄາດຄະເນຄັ້ງທໍາອິດປະມານ 50 ເທົ່າເພື່ອຊົດເຊີຍຄວາມຜິດພາດຂອງເຄື່ອງຈັກເຢັນແລະເຄື່ອງຈັກຮ້ອນ, ແລະຫຼັງຈາກນັ້ນກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາແລ້ວ. | 0.003 | |||||
| ຕໍາແຫນ່ງຂອງ Z-Axis |
 |
ກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາໃນແກນ z. ຫມາຍເຫດ: ການຄາດຄະເນຄັ້ງທໍາອິດປະມານ 50 ເທົ່າເພື່ອຊົດເຊີຍຄວາມຜິດພາດຂອງເຄື່ອງຈັກເຢັນແລະເຄື່ອງຈັກຮ້ອນ, ແລະຫຼັງຈາກນັ້ນກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາແລ້ວ. | 0.003 | |||||
| ຕໍາແຫນ່ງ y-axis |
|
ກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາໃນແກນ y. ຫມາຍເຫດ: ການຄາດຄະເນຄັ້ງທໍາອິດປະມານ 50 ເທົ່າເພື່ອຊົດເຊີຍຄວາມຜິດພາດຂອງເຄື່ອງຈັກເຢັນແລະເຄື່ອງຈັກຮ້ອນ, ແລະຫຼັງຈາກນັ້ນກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາແລ້ວ. | 0.004 | |||||
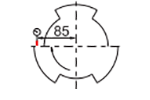
| C Axis Repart Poat |
|
ກວດສອບການປ່ຽນແປງຂອງ S-Axis ຈຸດຄົງທີ່, ຫມາຍເຫດທໍາອິດປະມານ 50 ຄັ້ງເພື່ອຊົດເຊີຍຄວາມຜິດພາດຂອງເຄື່ອງຈັກແລະເຄື່ອງຈັກຮ້ອນ, ແລະຫຼັງຈາກນັ້ນກວດພົບການຈັດຕໍາແຫນ່ງຊ້ໍາ | 20 ວິນາທີ arc | |||||
| C Axis ຕໍາແຫນ່ງ Rotary Rotary |

|
ກວດພົບຄວາມຖືກຕ້ອງຂອງຖານະທີ່ມີຄວາມຖືກຕ້ອງຂອງ C-Axis: ການຄາດຄະເນຄັ້ງທໍາອິດປະມານ 50 ຄັ້ງເພື່ອຊົດເຊີຍຄວາມຜິດພາດຂອງເຄື່ອງຈັກແລະເຄື່ອງຈັກຮ້ອນ | 72 ວິນາທີ ARC | |||||
| ການບີບອັດຫົວຫນ້າພະລັງງານ |
|
ໂກນດອກ | 0.015 | |||||
| ການບີບອັດຫົວຫນ້າພະລັງງານ |
 |
ຫນີບຕີ | 0.01 | |||||
| ຖ້າລູກຄ້າຕ້ອງການທົດສອບ ISO ຫຼື VD1 ຄວາມຖືກຕ້ອງຂອງ Axis X / Z / Y, ມັນຈະຖືກກໍານົດໃນເວລາຂຽນສັນຍາ. ລູກຄ້າຕ້ອງທົດສອບລາຍການນີ້ໃນເວລາດຽວກັນຂອງການຍອມຮັບໃນເບື້ອງຕົ້ນຂອງໂຮງງານ Jingfusi. | ||||||||
Hot Tags: turret ພະລັງງານຄວາມໄວສູງຫັນແລະ Milling ເຄື່ອງປະສົມ, ປະເທດຈີນ, ຜູ້ຜະລິດ, ຜູ້ສະຫນອງ, ໂຮງງານ, ຄຸນນະພາບ, ລາຍການລາຄາ
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.









X
ພວກເຮົາໃຊ້ cookies ເພື່ອສະເຫນີໃຫ້ທ່ານມີປະສົບການການຊອກຫາທີ່ດີກວ່າ, ວິເຄາະການເຂົ້າຊົມເວັບໄຊທ໌ແລະປັບແຕ່ງເນື້ອຫາ. ໂດຍການນໍາໃຊ້ເວັບໄຊທ໌ນີ້, ທ່ານຕົກລົງເຫັນດີກັບການນໍາໃຊ້ cookies ຂອງພວກເຮົາ.
ນະໂຍບາຍຄວາມເປັນສ່ວນຕົວ